P1. (SOBEL 에지) 다음과 같은 Grayscale 이미지를 만들어 각각 실험하라.

1) 위와 유사하게 원과 정사각형 도형이 그려진 이미지를 만들어라.
<코드>
| import cv2 import numpy as np import matplotlib.pyplot as plt ''' 1) 위와 유사하게 원과 정사각형 도형이 그려진 이미지는 만들어라. ''' #이미지 그릴 배경 그리기 im_circle = np.zeros([500, 500, 3], dtype= np.uint8) im_rect = np.zeros([500, 500, 3], dtype= np.uint8) center = (250, 250) #draw circle #패러미터: 반지름, 색상, 두께 -1(채워진 도형) im_circle = cv2.circle(im_circle, center, 100, color =(255,255,255), thickness=-1) #draw rectangle #각 대각선 좌표지정 pt1 = (150, 150) pt2 = (350, 350) #패러미터: 대상이미지, 대각좌표, 색상, 두께 -1 im_rect = cv2.rectangle(im_rect, pt1, pt2, color = (255,255,255), thickness=-1) plt.subplot(1,2,1) plt.imshow(im_circle) plt.title('circle') plt.subplot(1,2,2) plt.imshow(im_rect) plt.title('rectangle') plt.show() |
<결과>

2) Sobel 에지를 수평, 수직 측으로 구하고 (kernel size = 3), 여기서 magnitude 이미지를 이진화 하라. (오츄 알고리즘 등 사용)
<코드 - SOBEL 에지>
| def mySobel(src,c): #소벨 이미지 생성 gx = cv2.Sobel(src, cv2.CV_32F, 1, 0, ksize = 3) # x order = 1 only gy = cv2.Sobel(src, cv2.CV_32F, 0, 1, ksize = 3) # y if(c==1): #sobel 이미지 출력하기 plt.subplot(1,2,1) plt.imshow(gx,cmap='gray') plt.title('horizintal sobel') plt.subplot(1,2,2) plt.imshow(gy,cmap='gray') plt.title('vertical sobel') plt.show() else: #magnitude 이미지 리턴 #카테시안에서 극좌표로 바꾸기. 다만 angle값이 0~360 까지 나온다. #에지의 각도는 0~180까지이기 때문에 이래 해줘야 함. ㅇㅇ mag, angle = cv2.cartToPolar(gx, gy, angleInDegrees=True) dstM = cv2.magnitude(gx, gy) minVal, maxVal, minLoc, maxLoc = cv2.minMaxLoc(dstM) return dstM mySobel(im_circle,1) mySobel(im_rect,1) |
<결과 - SOBEL 에지>

<코드 - magnitude 이진화>
| def mySobel(src,c): #소벨 이미지 생성 gx = cv2.Sobel(src, cv2.CV_32F, 1, 0, ksize = 3) # x order = 1 only gy = cv2.Sobel(src, cv2.CV_32F, 0, 1, ksize = 3) # y if(c==1): #sobel 이미지 출력하기 plt.subplot(1,2,1) plt.imshow(gx,cmap='gray') plt.title('horizintal sobel') plt.subplot(1,2,2) plt.imshow(gy,cmap='gray') plt.title('vertical sobel') plt.show() else: #magnitude 이미지 리턴 #카테시안에서 극좌표로 바꾸기. 다만 angle값이 0~360 까지 나온다. #에지의 각도는 0~180까지이기 때문에 이래 해줘야 함. ㅇㅇ mag, angle = cv2.cartToPolar(gx, gy, angleInDegrees=True) dstM = cv2.magnitude(gx, gy) minVal, maxVal, minLoc, maxLoc = cv2.minMaxLoc(dstM) #이미지파일(3차원)으로 변환하는 코드 dstM = cv2.normalize(dstM, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U) return dstM #magnitude 이미지 생성 mag_circle = mySobel(im_circle,0) mag_rect = mySobel(im_rect,0) plt.subplot(1,2,1) plt.imshow(mag_circle, cmap='gray') plt.subplot(1,2,2) plt.imshow(mag_rect, cmap='gray') def mybin(src): #이진화 thres, im_bin = cv2.threshold(src, thresh = 0 , maxval = 255, type = cv2.THRESH_BINARY + cv2.THRESH_OTSU) plt.imshow(im_bin,cmap='gray') plt.show() return im_bin mag_circle_bin = mybin(mag_circle) mag_rect_bin = mybin(mag_rect) plt.subplot(1,2,1) plt.imshow(mag_circle_bin, cmap='gray') plt.title('bin') plt.subplot(1,2,2) plt.imshow(mag_rect_bin, cmap='gray') plt.title('bin') plt.show() |
<결과 - magnitude 이진화>

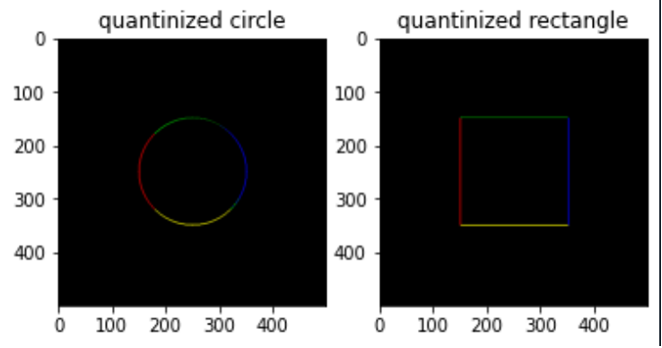
3) 이진화된 에지영역에서 gradient을 구하고 이를 4개의 영역으로 양자화 하고 각 영역 별로 다음과 같이 색을 매칭하여 이미지를 만들어라. (즉, -45 - 45 도: 빨강, 45 – 135.5: 녹색, 135 - 225: 파랑, 225- -45도: 노랑).
<코드>
| def quatiangle(src): #각도 찾기를 위한 그래디언트 구하기 gx = cv2.Sobel(src, cv2.CV_32F, 1, 0, ksize = 3) gy = cv2.Sobel(src, cv2.CV_32F, 0, 1, ksize = 3) #앵글계산 angles = np.arctan(gy/gx) print("nan?", np.isnan(angles)) # some are NAN becuase deivide-by-zero #nan값을 0으로 바꾸는 함수. 반드시 필요! np.nan_to_num(angles, copy= False, nan=0.0) # replace by zero print("nan?", np.isnan(angles)) # some are NAN becuase deivide-by-zero print(cv2.minMaxLoc(angles)) #radian -> degree 변환 angles = angles/np.pi*180.0 #이때 arctan 함수의 특성으로 인해 그래디언트 방향이 [-pi/2, pi/2]만 검출되는 문제 발생 #다음 문제 진행을 위해 어쩔수 없이 x-y 평면상에서 그래프를 찾고 부등식을 사용하여 해결 m=0 n=0 indexmat = np.zeros((500,500)) print('initial', indexmat) while(m<500): while(n<500): if(m>n): indexmat[m][n] = 1 n=n+1 m=m+1 n=0 print('indexmat_2',indexmat) print('nonzero',np.count_nonzero(indexmat)) angles[(indexmat == 1)] = angles[(indexmat == 1)] + 180 m=0 n=0 indexmat = np.zeros((500,500)) print('initial', indexmat) while(m<500): while(n<500): if((m>n) & (m>-n+500)): indexmat[m][n] = 1 n=n+1 m=m+1 n=0 print('indexmat_2',indexmat) print('nonzero',np.count_nonzero(indexmat)) angles[(indexmat == 1)] = angles[(indexmat == 1)] + 180 #각도의 양자화 #양자화를 위한 인덱스 매트릭스 생성 dstAngles = np.zeros([angles.shape[0], angles.shape[1]], dtype = np.uint8) #-45 ~ 45, R dstAngles[ (angles >= -45) & (angles < 45) ] = 1 #45 ~ 135, G dstAngles[ (angles >= 45) & (angles < 135) ] = 2 #135 ~ 225, B dstAngles[ (angles >= 135) & (angles < 255) ] = 3 #255~-45, Y dstAngles[ angles >= 255 ] = 4 dstAngles[src < 30] = 0 #0은 엣지가 아닌 부분 의미 #angle test print('angle quantinization test:') print(np.count_nonzero(dstAngles[dstAngles == 1])) print(np.count_nonzero(dstAngles[dstAngles == 2])) print(np.count_nonzero(dstAngles[dstAngles == 3])) print(np.count_nonzero(dstAngles[dstAngles == 4])) print(np.count_nonzero(dstAngles[dstAngles == 0])) #출력용 컬러영상 배경 그리기 im_black = np.zeros([500, 500, 3], dtype= np.uint8) im_black[dstAngles==1]=(0,0,255) im_black[dstAngles==2]=(0,255,0) im_black[dstAngles==3]=(255,0,0) im_black[dstAngles==4]=(255,255,0) plt.imshow(im_black) plt.title('final') plt.show() return im_black #for test quanti_circle = quatiangle(mag_circle_bin) quanti_rect = quatiangle(mag_rect_bin) plt.subplot(1,2,1) plt.imshow(quanti_circle) plt.title('quantinized circle') plt.subplot(1,2,2) plt.imshow(quanti_rect) plt.title('quantinized rectangle') |
<결과>
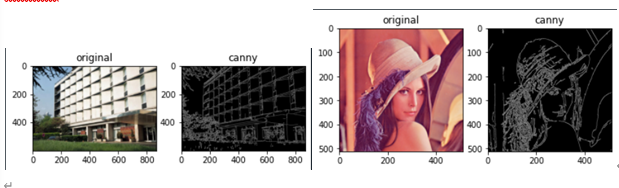
P2. (Canny 에지) 다음 두 이미지를 이용하여 캐니 에지 실험을 해본다.

1) T_high = 2.5 *T_low로 하면서 Tlow를 조절하여 파라메터를 사용하여 Canny 검출을 한 결과를 관찰하고 각각 영상에 가장 적절한 Tlow 값을 결정해보라.
<코드>
| import cv2 import numpy as np import matplotlib.pyplot as plt ''' 1) T_high = 2.5 *T_low로 하면서 Tlow를 조절하여 파라메터를 사용하여 Canny 검출을 한 결과를 관찰하고 각각 영상에 가장 적절한 Tlow 값을 결정해보라 ''' def mycanny(src,tl,var): orig = src th = 2.5*tl #가우시안 필터 적용 if(var != -1): src = cv2.GaussianBlur(src, (0,0), var) th=tl #흑백영상으로 변환 src_gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY) #캐니에지 적용 canny_src = cv2.Canny(src_gray, threshold1= th, threshold2 = tl) orig = cv2.cvtColor(orig, cv2.COLOR_BGR2RGB) plt.subplot(1,2,1) plt.imshow(orig) plt.title('original') plt.subplot(1,2,2) plt.imshow(canny_src,cmap='gray') plt.title('canny') plt.show() img1 = cv2.imread('p2_1.png') img2 = cv2.imread('p2_2.png') mycanny(img1, 71, -1) |
<결과>

위의 결과로부터 각각 순서대로 Tlow=71,55 로 설정하였을 때 결과가 가장 좋게 나오는 것을 확인하였다.
2) 위의 가우시안 필터 중에서 가장 맘에 드는 것을 하나를 정하고, T_high 와 T_low 를 같은 값으로 세팅하여 결과를 살펴 보라.
<코드>
| ''' 2)위의 가우시안 필터 중에서 가장 맘에 드는 것을 하나를 정하고, T_high 와 T_low 를 같은 값으로 세팅하여 결과를 살펴 보라. ''' mycanny(img1, 71, 1) mycanny(img2, 55, 1) |
<결과>

3) 1)의 실험을 Histogram Equalizer를 수행한 이후에 반복해보라.
<코드>
| img1_hist = cv2.equalizeHist(img1) img2_hist = cv2.equalizeHist(img2) mycanny(img1_hist, 71, -1) mycanny(img2_hist, 55, -1) mycanny(img1_hist, 71, 1) mycanny(img2_hist, 55, 1) |
<결과 - 가우시안 필터 미적용>
<결과 - 가우시안 필터 적용>

P3. (Laplacian 필터) 다음 그림을 이용하여 구현 및 실험을 하시오.

1) 책의 (3.12) 식을 이용하여 LoG 필터의 커널을 만들어라. 그 결과를 책 그림 3-13과 비교 하라. (sigma = 0.5, 1.0, 2.0, 5.0).
<코드>
| import cv2 import numpy as np from matplotlib import pyplot as plt ''' 1) 책의 (3.12) 식을 이용하여 LoG 필터의 커널을 만들어라. 그 결과를 책 그림 3-13과 비교 하라. (sigma = 0.5, 1.0, 2.0, 5.0). ''' def LOGkernel(ksize,sigma): #가우시안 커널 먼저 생성 vector = cv2.getGaussianKernel(ksize, sigma) gkernel = np.outer(vector, vector.transpose()) print('test:', gkernel) #LOG 커널 생성하기 m,n = 0, 0 center = ksize//2 LOGker = np.zeros((ksize,ksize)) while(m<ksize): while(n<ksize): #교재의 3.12 식은 커널의 원점이 (0,0)이라는 가정하에 유도된 식이기 때문에 적절한 좌표이동 적용. LOGker[m][n] = (((m-center)**2 + (n-center)**2 - 2*sigma**2)/(sigma**4)) * gkernel[m][n] n=n+1 m=m+1 n=0 return LOGker img=cv2.imread('p2_2.png') Lkernel_0 = LOGkernel(3, 0.5) Lkernel_1 = LOGkernel(7, 1) Lkernel_2 = LOGkernel(13, 2) Lkernel_5 = LOGkernel(31, 5) |
<결과 - 시그마 0.5>

<결과 - 시그마 1>

<결과 - 시그마 2>

<결과 - 시그마 5>

2) 그림의 이미지를 이용하여 Gaussian Filter를 하고, Laplacian Filter를 차례대로 처리한 결과와 LOG 필터를 직접 적용한 결과를 차 영상을 만들어 비교하라 (sigma = 0.5, 1.0, 2.0, 5.0).
<코드>
| def LOGcom(src,sigma,kernel): ksize = np.shape(kernel) print('test:',ksize) #Laplacian filtering after Gaussian filtering img1 = cv2.GaussianBlur(src,ksize,sigma) img1 = cv2.Laplacian(img1, -1) #LOG filter img2 = cv2.filter2D(img, -1, kernel) diff = img1-img2 plt.imshow(diff,cmap='gray') plt.title('diffrence') plt.show() return img=cv2.imread('p2_2.png') img=cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) LOGcom(img,0.5,Lkernel_0) LOGcom(img,1,Lkernel_1) LOGcom(img,2,Lkernel_2) LOGcom(img,5,Lkernel_5) |
<결과>

순서대로 시그마 = 0.5, 1, 2, 5 를 적용한 차 영상이며 kernel의 사이즈가 작은 0.5 영상과 표준편차(시그마)가 큰 5 영상에서 결과차이가 많이 발생하지 않았다.
P4. (Hough Line) 다음 그림을 이용하여 Hough Line 을 적용하여 보라.

1) 2차원 Gaussian 필터의 파라메터를 조절하면서 Hough 선이 잘 검출되도록 하라.
<코드>
| import cv2 import numpy as np from matplotlib import pyplot as plt ''' 1) 2차원 Gaussian 필터의 파라메터를 조절하면서 Hough 선이 잘 검출 되도록 하라. ''' img=cv2.imread('p4.png') def myHough(src,sigma): #원본이미지 복사 orig=src img_gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY) #가우시안 필터링 img = cv2.GaussianBlur(img_gray,(13,13),sigma) #캐니 에지 img_canny = cv2.Canny(img, 50, 150, apertureSize = 3) #패러미터는 이미지, 로 해상도, 세타 해상도, threshold lines = cv2.HoughLines(img_canny, 1, np.pi/180, 100) #rho, theta로 표현된 직선을 직교좌표계로 변환 for i, line in enumerate(lines): rho,theta = line[0] # rho and theta a = np.cos(theta) # x sin(theta) + y cos(theta) = rho b = np.sin(theta) x0 = a*rho # 수직교점 y0 = b*rho t = 1000 x1 = int(x0 + t*(-b)) y1 = int(y0 + t*(a)) x2 = int(x0 - t*(-b)) y2 = int(y0 - t*(a)) #라인 그리기 cv2.line(orig,(x1,y1),(x2,y2),(255,0,0),3) return orig final = myHough(img, 2) final = cv2.cvtColor(final, cv2.COLOR_BGR2RGB) plt.imshow(final) plt.show() |
<결과>

2) 위에서 얻은 라인들중에서 래인들을 위한 조건을 이용하여 레인들에 해당하는 선들만 남겨라. (OpenCV는 theta 가 0 – 180 도로 주어지는 것에 주의 할 것, 따라서 수평라인은 90도.)
<코드>
| def myHough(src,sigma): #원본이미지 복사 orig=src img_gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY) #가우시안 필터링 img = cv2.GaussianBlur(img_gray,(13,13),sigma) #캐니 에지 img_canny = cv2.Canny(img, 50, 150, apertureSize = 3) #패러미터는 이미지, 로 해상도, 세타 해상도, threshold lines = cv2.HoughLines(img_canny, 1, np.pi/180, 100) #rho, theta로 표현된 직선을 직교좌표계로 변환 for i, line in enumerate(lines): rho,theta = line[0] # rho and theta a = np.cos(theta) # x sin(theta) + y cos(theta) = rho b = np.sin(theta) x0 = a*rho # 수직교점 y0 = b*rho t = 1000 x1 = int(x0 + t*(-b)) y1 = int(y0 + t*(a)) x2 = int(x0 - t*(-b)) y2 = int(y0 - t*(a)) #라인 그리기 #함수 수정 if not(rho > 0 and theta > np.pi/2): cv2.line(orig,(x1,y1),(x2,y2),(255,0,0),3) return orig final = myHough(img, 2) final = cv2.cvtColor(final, cv2.COLOR_BGR2RGB) plt.imshow(final) plt.show() |
<결과>
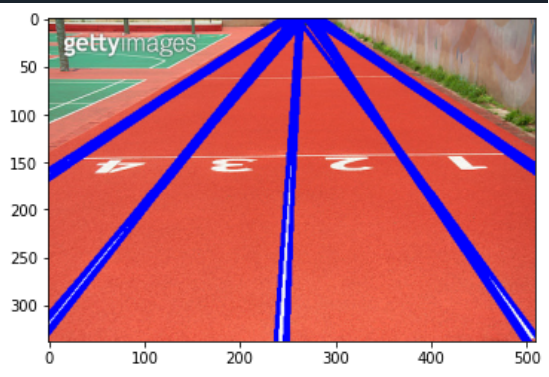
3) 다음 이미지에 대하여 위 알고리즘을 적용하여 보라. 어떤 문제가 있는가?

<코드>
| img2 = cv2.imread('p4_2.png') final2 = myHough(img2, 3) final2 = cv2.cvtColor(final2, cv2.COLOR_BGR2RGB) plt.imshow(final2) plt.show() |
<결과>

선로의 아래쪽 부분이 잘 검출되지 않았으며 왼쪽의 전신주 또한 같이 검출되었다.
원본 이미지에서 선로와 배경간의 색상차이가 얼마 나지 않아 생긴 문제일 것이다.
P5. [영역분할] 다음 이미지를 보고 등불의 개수를 카운팅하는 프로그램을 작성하려고 한다.

(1) 다음 이미지를 전처리을 수행하고 이진화 및 후 처리하여 영역분할하라.
(2) 위의 영역분할의 결과를 이용하여 찾은 전구의 위치를 표시하고 번호를 매겨서, 개수를 학인 해보라.
*1,2번 동시 수행
<코드>
| import cv2 import numpy as np from matplotlib import pyplot as plt img = cv2.imread('p5.png') def region(src): #오리지널 영상 저장 orig= src #흑백으로 변경 src = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY) #오츄 알고리즘 사용 이진화 # + cv2.THRESH_OTSU thres, im_bin = cv2.threshold(src, thresh = 230 , maxval = 255, type = cv2.THRESH_BINARY) #모폴로지컬 필터 사용 #erosion 함수, 뒤의 패러미터는 몇번 적용할 것인가 kernel = np.ones((3,3),np.uint8) #하얀색 영역 내에 있는 모든 노이즈 제거.(안 하면 영역이 여러개 나온다) im_bin = cv2.morphologyEx(im_bin, cv2.MORPH_CLOSE, kernel) erosion = cv2.erode(im_bin,kernel,iterations = 5) dilation = cv2.dilate(erosion,kernel,iterations = 5) retval, labels, stats, centroids= cv2.connectedComponentsWithStats(dilation) print('retval=',retval) #인덱스 0은 배경을 의미하기 때문에 1부터 시작 m=1 while(m<retval): orig = cv2.circle(orig, (int(centroids[m,0]),int(centroids[m,1])) ,20 , (0,0,255), thickness=5) m=m+1 plt.imshow(orig[:,:,::-1]) plt.axis('off') plt.title('counting') plt.show() region(img) |
<결과>

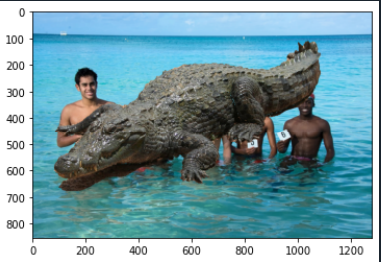
P6. [Grabcut] Grab-cut을 이용한 이미지 블렌딩을 수행해본다.
1) 수업에서 사용한 마스크 드로잉 코드들 활용하고 Grabcut 함수를 이용하여 다음 악어를 잘라내라.

<코드 - 드로잉>
| img = cv2.imread('p6_1.png') # 입력 영상 mask = np.ones([img.shape[0], img.shape[1]], dtype = 'uint8') * 128 # 패인트 작업 저장 ########################### #드로잉 코드로 마스크 영상 만들기 ########################### key_pressed = False mouse_pressed = False color = 0 # 마우스에 특정 이벤트가 밸생하면 호출됨 def mouse_callback(event, x, y, flags, param): print('event:', event, 'x:', x, 'y:', y, 'flags:', flags) global mouse_pressed, key_pressed, color # 함수 외부에 선언된 변수를 사용하기 위한 선언 if event == cv2.EVENT_LBUTTONDOWN: mouse_pressed = True cv2.circle(img, (x, y), 5, (color, color, color), cv2.FILLED) cv2.circle(mask, (x, y), 5, color, cv2.FILLED) elif event == cv2.EVENT_MOUSEMOVE: if mouse_pressed: cv2.circle(img, (x, y), 5, (color, color, color), cv2.FILLED) cv2.circle(mask, (x, y), 5, color, cv2.FILLED) elif event == cv2.EVENT_LBUTTONUP: mouse_pressed = False cv2.namedWindow('image') cv2.setMouseCallback('image', mouse_callback) while True: cv2.imshow('image', img) k = cv2.waitKey(1) # 이 안에서 기다리다가 마우스 이벤트가 발생하면 콜백을 호출하고, 키보드 입력은 반환이 됨. if k == ord('c'): # 종료 명령 cv2.imwrite('mask.png', mask) break elif k == ord('0'): # 0은 배경 지정 color = 0 #(0,0,0) elif k == ord('1'): # 1은 전경 지정 color = 255 #(255,255,255) cv2.destroyAllWindows() ################################################# |
<코드 - 검출>
| mask = np.zeros(img.shape[:2],np.uint8) bgdModel = np.zeros((1,65),np.float64) #13X5=65. (GMM -5), weight, mean 3개. (RGB라 3개), 3X3=9개 fgdModel = np.zeros((1,65),np.float64) rect=(45,95,1050,650) cv2.grabCut(img,mask,rect,bgdModel,fgdModel,1,cv2.GC_INIT_WITH_RECT) img1 = img*np.where((mask==2)|(mask==0),0,1).astype('uint8')[:,:, np.newaxis] #0=확실한 백그라운드 의미, 2=아마도 백그라운드 의미. 즉 조건연산자로 작동. mask가 0 OR 2면 0대입 아니면 1 대입 #np.newaxis? img와 np.where의 곱셈을 위해 차원 캐스팅 mask1 = mask.copy() newmask = cv2.imread('mask.png',0) mask[newmask == 0] = 0 mask[newmask == 255] = 1 cv2.grabCut(img,mask,None,bgdModel,fgdModel,1,cv2.GC_INIT_WITH_MASK) mask2 = np.where((mask==2)|(mask==0),0,1).astype('uint8') img2 = img*mask2[:,:,np.newaxis] plt.subplot(2,2,1), plt.imshow(mask, cmap='gray'), plt.title('after mask'), plt.axis('off') plt.subplot(2,2,2), plt.imshow(img2[:,:,::-1]), plt.title('final'), plt.axis('off') plt.show() |
<결과>

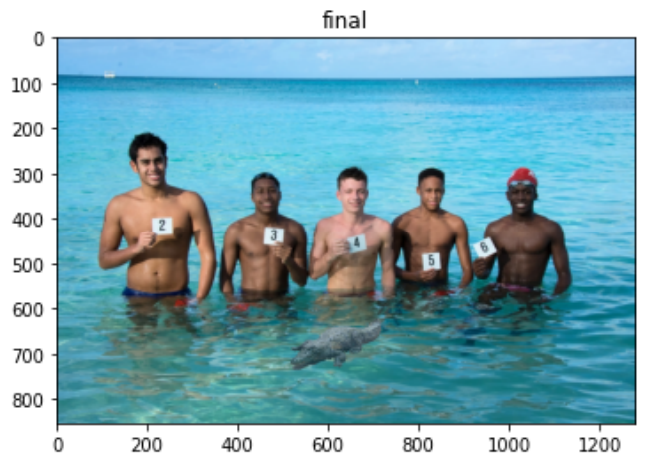
2) 위에서 얻어진 masked image를 크기를 조절하여 다음 영상의 앞부분 위치에 오버라이드 (덮어쓰기)하여 합성하라.

<코드>
| ''' 2) 위에서 얻어진 masked image를 크기를 조절하여 다음 영상의 앞부분 위치에 오버라이드 (덮어쓰기)하여 합성하라. ''' img_back = cv2.imread('p6_2.png') img_croc = cv2.imread('after.png') #오버라이드. 악어 이미지에서 화소값이 (0,0,0)이 아닌 부분을 background 이미지에 붙여넣기 m=0 n=0 msize,nsize = 787,1199 while(m < msize): while(n < nsize): b,g,r = img_croc[m][n] B,G,R = img_back[m][n] if((img_croc[m,n,0]!=0)&(img_croc[m,n,1]!=0)&(img_croc[m,n,2]!=0)): img_back[m,n,0]=img_croc[m,n,0] img_back[m,n,1]=img_croc[m,n,1] img_back[m,n,2]=img_croc[m,n,2] n=n+1 m=m+1 n=0 plt.imshow(img_back[:,:,::-1]) plt.show() |
<결과>
3) 좀더 자연스러운 결과를 보이기 위하여 alpha blending 기법을 이용하라. 즉, 악어의 바운더리 영역에 점차 alpha 값을 조절하라. (cv2.distanceTransform 을 활용할 수 있다.)
<코드>
| img_back = cv2.imread('p6_2.png') img_croc = cv2.imread('after.png') #test plt.imshow(img_croc) plt.title('original') plt.show() #사이즈 조절 img_croc = cv2.resize(img_croc,dsize=(0,0),fx=0.2,fy=0.2,interpolation=cv2.INTER_LINEAR) plt.imshow(img_croc) plt.title('original_resize') plt.show() #오버라이드. 악어 이미지에서 화소값이 (0,0,0)이 아닌 부분을 background 이미지에 붙여넣기 m=0 n=0 dy=600 dx=500 msize,nsize,tmp = np.shape(img_croc) alp=0.7 while(m < msize): while(n < nsize): b,g,r = img_croc[m][n] B,G,R = img_back[m+dy][n+dx] if((img_croc[m,n,0]!=0)&(img_croc[m,n,1]!=0)&(img_croc[m,n,2]!=0)): img_back[m+dy,n+dx,0]=alp*img_croc[m,n,0] + (1-alp)*img_back[m,n,0] img_back[m+dy,n+dx,1]=alp*img_croc[m,n,1] + (1-alp)*img_back[m,n,1] img_back[m+dy,n+dx,2]=alp*img_croc[m,n,2] + (1-alp)*img_back[m,n,2] n=n+1 m=m+1 n=0 plt.imshow(img_back[:,:,::-1]) plt.title('final') plt.show() |
<결과>
참고 자료
컴퓨터 비전(Computer Vision)
기본 개념부터 최신 모바일 응용 예까지-
저자오일석
-
출판한빛아카데미
-
출간2014.07.30.
'프로그래밍 > 영상처리공학' 카테고리의 다른 글
| [영상처리공학/OpenCV with python]연주 영상 인식 피아노 (0) | 2022.12.19 |
|---|---|
| [HW 2]히스토그램, 이진 영상, Morphology 필터 & 기하변환 (0) | 2022.12.18 |
| [HW 1]영상처리 기본, Python & OpenCV (0) | 2022.12.18 |